利用例ヒューマノイドロボット

-
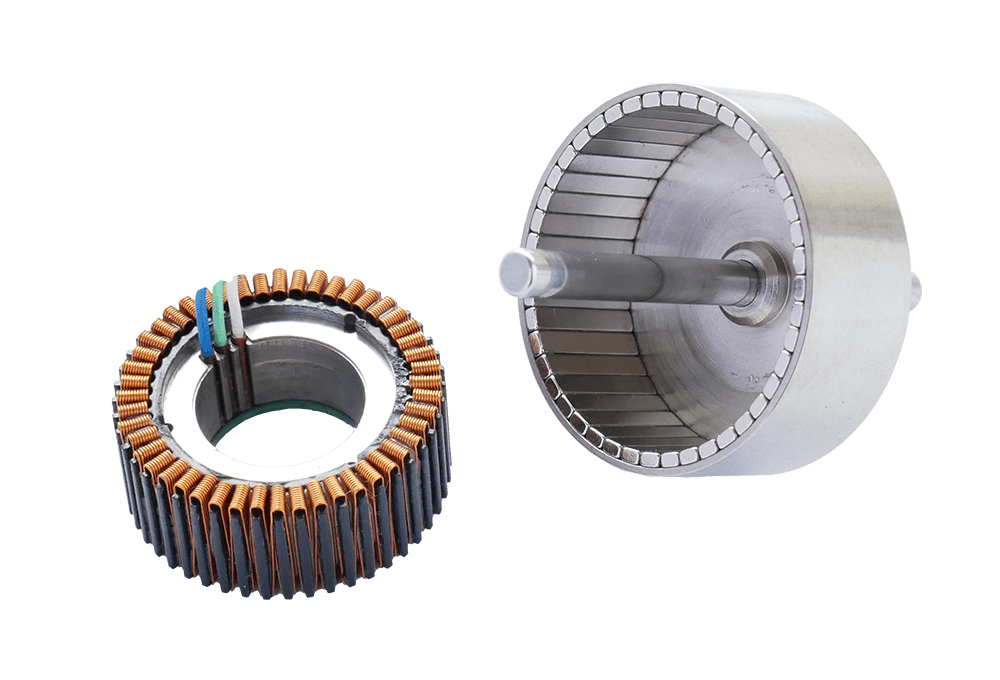
採用製品:UM-2510
-
実装箇所
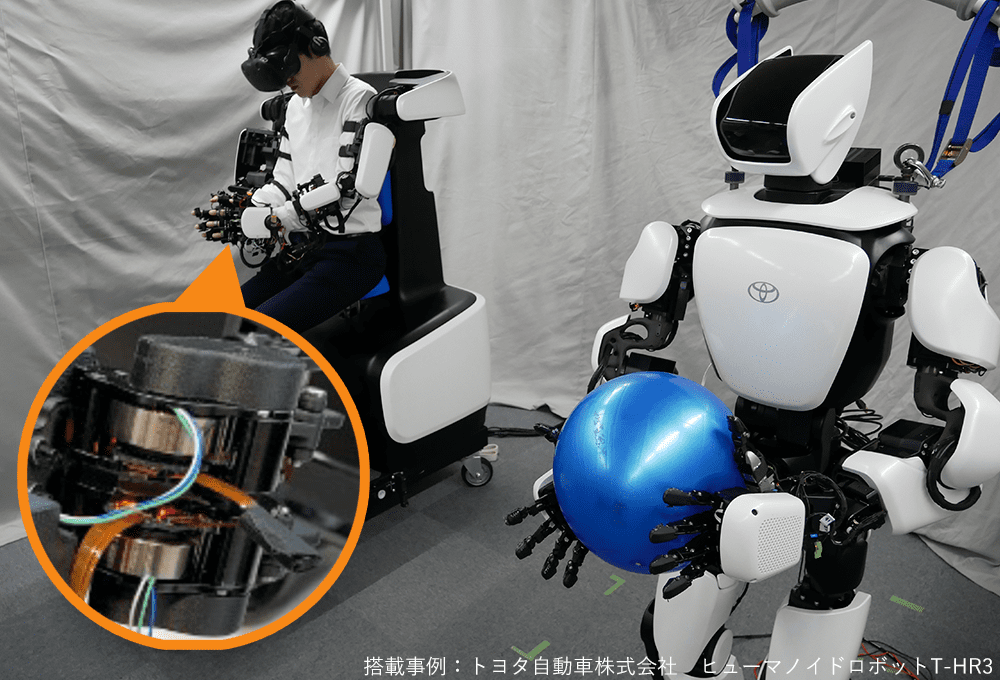
触覚デバイス(親指を除く指8本に搭載)
利用背景
力の加減を伝えると言うモータの新しい役目を果たすために
日々開発が進んでいるヒューマノイドロボットでも当社製品は採用されております。
採用された当ロボットでは、ロボットとそれを操る操縦者(マスター操縦システム)からなり、操縦者の動きを一方的に伝えるだけでなく、ロボットが外から受けた力を遠隔地の操縦者に伝えるという感覚の共有が求められました。
その繊細な動きをリニアに伝えることを可能としたのが、東京モートロニクスの超多極ブラシレスモータ「UM-8045」をベースとしてモータ径φ25まで小型化した「UM-2510」です。
東京モートロニクスのモータ微細加工と組込み技術を用いることで指関節に近いサイズへの小型化を実現し、ロボットの関節部分に搭載されました。
採用された当ロボットでは、ロボットとそれを操る操縦者(マスター操縦システム)からなり、操縦者の動きを一方的に伝えるだけでなく、ロボットが外から受けた力を遠隔地の操縦者に伝えるという感覚の共有が求められました。
その繊細な動きをリニアに伝えることを可能としたのが、東京モートロニクスの超多極ブラシレスモータ「UM-8045」をベースとしてモータ径φ25まで小型化した「UM-2510」です。
東京モートロニクスのモータ微細加工と組込み技術を用いることで指関節に近いサイズへの小型化を実現し、ロボットの関節部分に搭載されました。
ロボットが担う未来とモータの役割
これまでモータは動力としての役割を担ってきましたが、未来におけるモータは人間の感覚を伝える完成伝達というステージに入ってきていると考えており、当ロボットに採用されたことは、東京モートロニクスの第一歩の利用例と言えるかと考えております。